Як відомо, електродвигуни бувають трьох основних типів: колекторні, крокові і сервоприводи. У даній статті ми розглянемо підключення колекторного електродвигуна до Arduino з допомогою драйвера двигунів на основі мікросхеми L9110S або аналогічному.
Вам знадобиться
- – Arduino;
- – персональний комп’ютер з середовищем розробки Arduino IDE;
- – драйвер двигунів L9110S або аналогічний;
- – колекторний електродвигун;
- – з’єднувальні дроти.
Інструкція
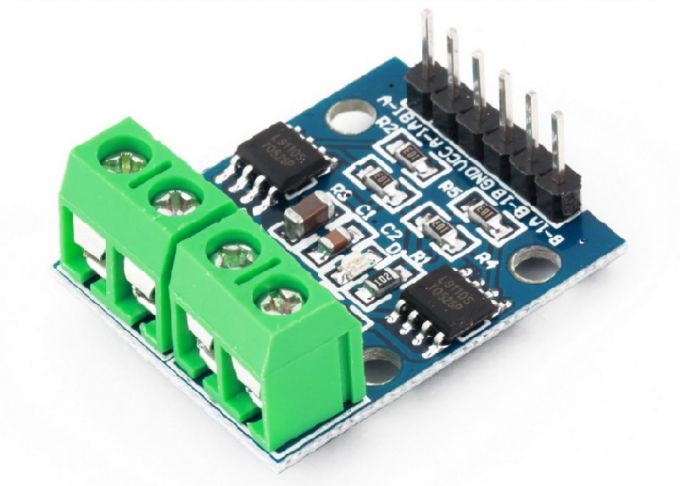
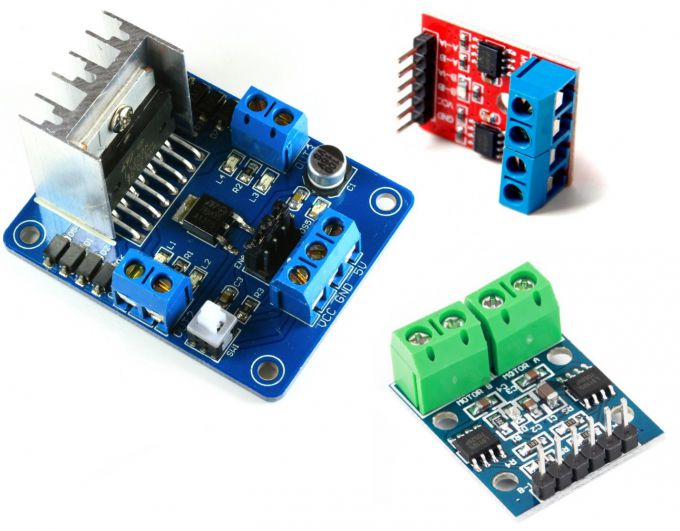
1. Безпосередньо підключити електродвигун до висновків Arduino не можна: є ризик спалити висновок, до якого підключений двигун. Для безпечного підключення електродвигунів різних типів до Arduino необхідний саморобний або промислово виготовлений драйвер двигунів. Драйвери двигунів бувають різні. Найбільш поширені типи HG788, L9110S, L293D, L298N та інші. Драйвери двигунів мають виводи живлення, виводи для підключення електродвигунів, а також керуючі висновки. В даній статті ми будемо використовувати драйвер для управління двигунами, зроблений на основі мікросхеми L9110S. Зазвичай випускаються плати, які підтримують підключення декількох двигунів. Але для демонстрації ми обійдемося одним.
2. Найпростіші двигуни – колекторні двигуни. У таких моторів всього два керуючих контакту. В залежності від полярності прикладеної до них напруги змінюється напрямок обертання вала двигуна, а величина прикладеної напруги змінює швидкість обертання.
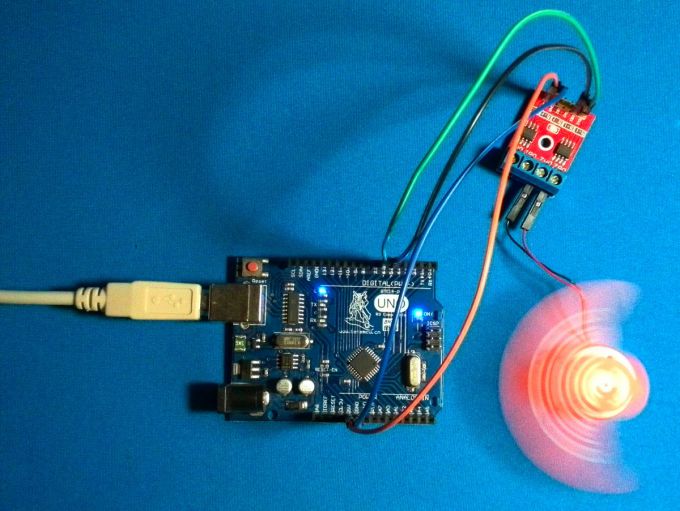
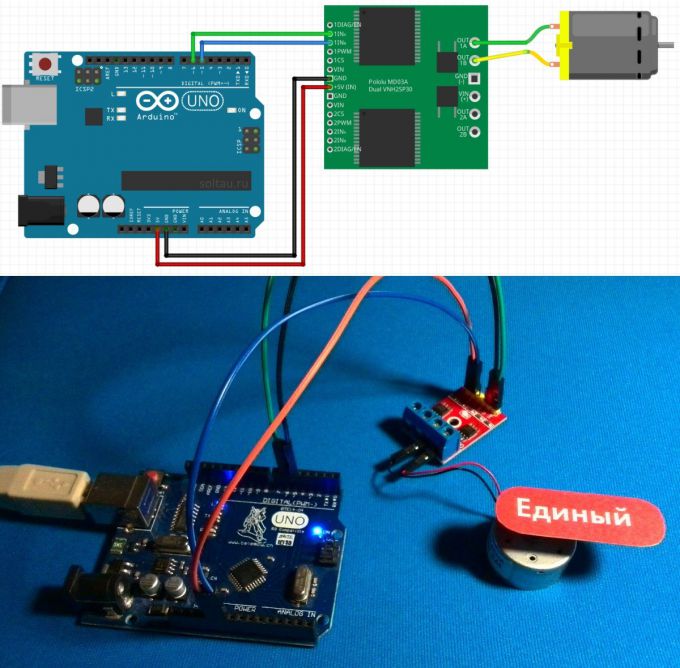
Давайте підключимо двигун з доданою схемою. Живлення драйвера двигуна – 5 В від Arduino, для керування швидкістю обертання ротора мотора керуючі контакти підключаємо до висновків Ардуїнов підтримкою ШІМ (широтно-імпульсну модуляцію).
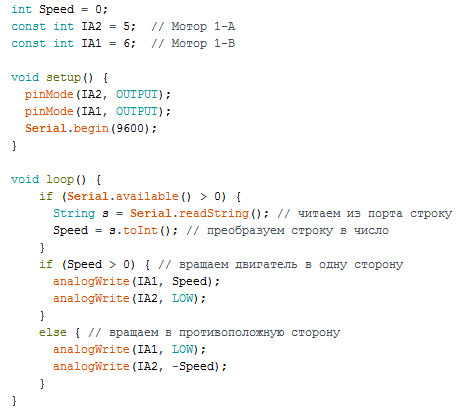
3. Напишемо скетч для управління колекторним двигуном. Оголосимо дві константи для ніжок, керуючих двигуном, і одну змінну для зберігання значення швидкості. Будемо передавати в послідовний порт значення змінної Speed і змінювати таким чином швидкість і напрямок обертання двигуна.
Максимальна швидкість обертання – при найбільшому значенні напруги, яке може видати драйвер двигуна. Ми можемо керувати швидкістю обертання, подаючи напруги в діапазоні від 0 до 5 Вольт. Так як ми використовуємо цифрові ніжки з ШІМ, напруга на них регулюється командою analogWtirte(pin, value), де pin – номер висновку, на якому ми хочемо задати напругу, а аргумент value – коефіцієнт, пропорційний значенню напруги, що приймає значення в діапазоні від 0 (напруга на виводі дорівнює нулю) до 255 (напруга на виводі одно 5 В).
4. Завантажимо скетч в пам’ять Arduino. Запустимо його. Двигун не обертається. Щоб задати швидкість обертання, потрібно передати в послідовний порт значення від 0 до 255. Напрямок обертання визначається знаком числа.
Підключимося з допомогою будь терминалки до порту, передамо число “100” – двигун почне обертатися з середньою швидкістю. Якщо подамо “мінус 100”, то він почне обертатися з тією ж швидкістю в протилежному напрямку.